网堵新闻网3月12日电 磁控柔性驱动器通常由具备磁响应变形能力的柔性复合材料制备获得,在外加磁场的驱动、控制、引导下,可实现非接触式的连续形变、灵活运动、输运货物等功能。磁场驱动凭借其中低频磁场安全性高、可穿透人体组织而不发生明显衰减、通过电信号可实现精准控制等优势,近年来在生物医疗领域展现了广阔的应用前景,也逐渐成为了学科交叉和前沿探索的研究热点。然而,传统的磁控柔性驱动器制备后其磁分布也随之确定,目前缺乏具备可重编程能力、能够高效集成其他功能模块的磁控柔性驱动器。
近日,十大老牌网堵网址深圳国际研究生院弥胜利教授团队报道了一种像素组装式的磁控柔性驱动器的制备工艺,可应用于低成本、可回收、可重编程的磁控驱动器的构建,实现定制化结构变形与仿生运动(抓取、游泳、蠕动等),并集成微流控功能模块可用于开关阀控制、曲率调节、动态芯片结构与液体药物输送机器人等功能。
研究中,团队利用PDMS-NdFeB混合物所制备的像素点与硅胶薄膜之间基于伦敦色散力的可逆粘附作用,通过旋涂、打孔、充磁的方法建立了磁性像素点的基本单元库,根据预期变形设计结构的磁分布,进而基于粘贴组装的简易方式构建具备重编程能力的磁驱动柔性驱动器(图1)。团队构建了多样化功能的磁驱动柔性驱动器,实现了折纸、剪纸、图案化变形,以及六爪抓取、树叶飘动、章鱼游泳、蠕虫蠕动等仿生运动。团队将微流控功能模块集成到硅胶基底层,应用于微流控芯片的开关阀控制、芯片曲率调节、流体混合、动态微流控芯片结构的构建,并开发了一款液态药物递送的磁驱动爬行机器人,结合毒牙式微针,具备体内定点药物释放的应用潜力(图2)。
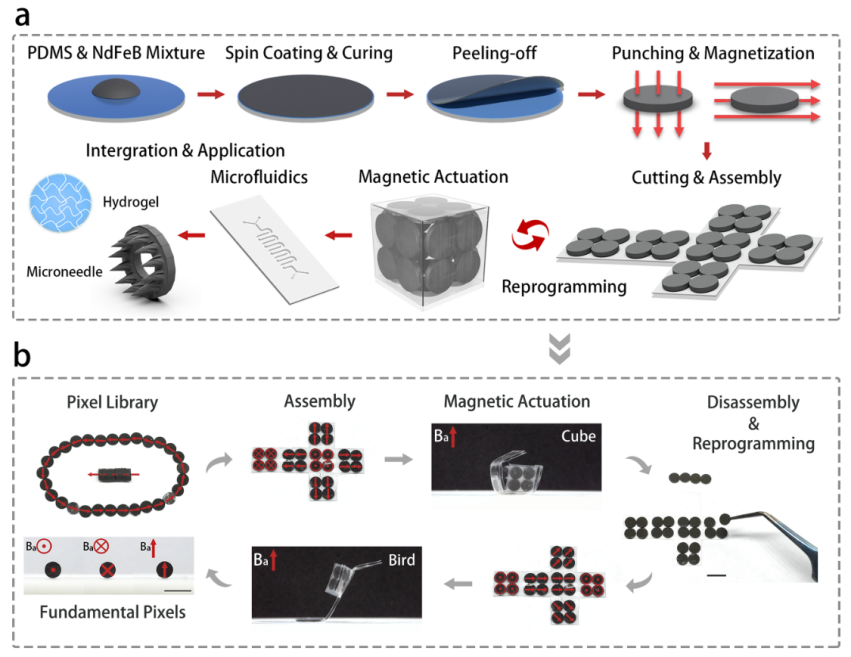
图1.像素化组装磁控柔性驱动器
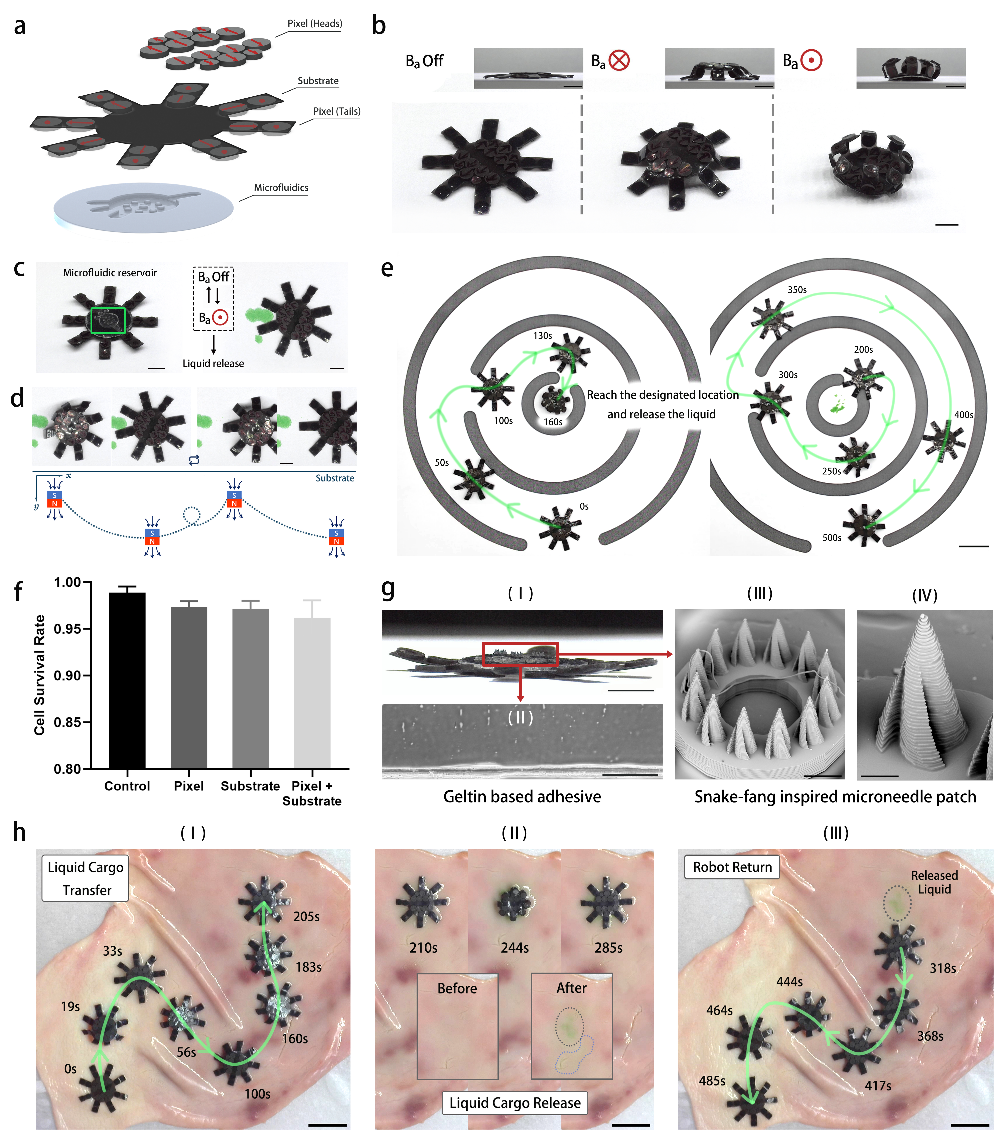
图2.磁驱动液态药物递送机器人
相关研究成果以“基于像素化组装的可重编程可集成微流控功能模块的磁控柔性驱动器”(Reprogrammable Magnetic Soft Actuators with Microfluidic Functional Modules via Pixel-Assembly)为题,近日发表于《微尺度》(Small)。
十大老牌网堵网址深圳国际研究生院弥胜利教授为论文通讯作者,十大老牌网堵网址深圳国际研究生院2023级博士生赵笑宇为论文第一作者。研究得到国家自然科学基金委以及深圳市发展和改革委员会战略性新兴产业发展专项资金扶持计划的支持。
论文链接:
https://doi.org/10.1002/smll.202310009
供稿:深圳国际研究生院
编辑:李华山
审核:郭玲











