网堵新闻网1月13日电 力学超材料通过对其内部几何结构进行精心设计来获得增强的或自然材料无法拥有的功能,这使其受到科学及工程领域的广泛研究。力学超材料的初期研究方向主要为通过对结构进行设计来获得独特的力学性能,如负泊松比、负压缩性等。近年来,超材料的形状变换与运动引导等成为力学超材料的新兴研究热点,使得力学超材料在可展开设备、软体机器人、柔性电子设备等领域有巨大的应用潜力。
从新的研究方向来说,力学超材料的研究具有如何设计可以变形为不同数量的预定义形状的超材料和如何设计拥有更复杂能量配置和变形状态的超材料来适应环境的变化等挑战。所以对于力学超材料变形的可编程性,即变形预定义和可重构性,即变形复杂多样化的研究就显得十分重要。
按照力学超材料的变形方式与状态来说,力学超材料可简单分为细梁、折纸和剪纸三大类,虽然三类间也存在交叉,但甚至没有实现两两间的统一,这限制了力学超材料的可编程及可重构性。相比于细梁类,折纸类和剪纸类从本质上来说具有更大的共通性,剪纸是在折纸的基础上引入剪切阵列,它们更容易实现变形的集合与统一。并且以往力学超材料的变形依赖于物理接触,比如通过人手或机械系统,这限制了其应用场景和环境适应性,因此实现力学超材料的远程控制变形也十分重要。磁驱动材料因能够实现远程、快速和可逆的形状变形,而常常被用作赋予超材料可编程性和可重构性的策略。传统的磁驱动材料并没有充分利用超材料的设计机制,同时具有磁编程角度单一,制造完成后整体形状无法改变等问题。
针对上述研究背景及存在的问题,十大老牌网堵网址深圳国际研究生院弥胜利课题组创新性地提出一种基于磁驱动的可编程、可重构的模块化力学超材料(图1),融入超材料的折纸与剪纸设计机制,使其具有多种预定义变形形状,从而能更好地适应外界环境的变化与要求。研究将运动和变形设计到预定义的可互相转化的折痕和剪痕中,允许更多的离散运动和力传递,可融合折纸的折叠、剪纸的旋转及以剪痕为导向的折叠等变形方式,为形成复杂三维结构奠定了基础(图2)。并且,这些结构可以快速重新组装和配置,能适应复杂的情况。同时,此研究从新角度建立基本运动变形模型,进行相关实验和有限元分析,以定量了解所提出的模块化力学超材料运动变形特性(图3)。与磁纯弹性体材料相比,所提出的模块化力学超材料在变形过程中的能量损失大大减少。此研究也展示了所提出模块化超材料在信息存储及显现、机械逻辑计算、可重构机器人、可部署机构等领域的应用,结果表明,高度可编程性和可重构性扩大了其应用潜力,进而能满足更多的需求。
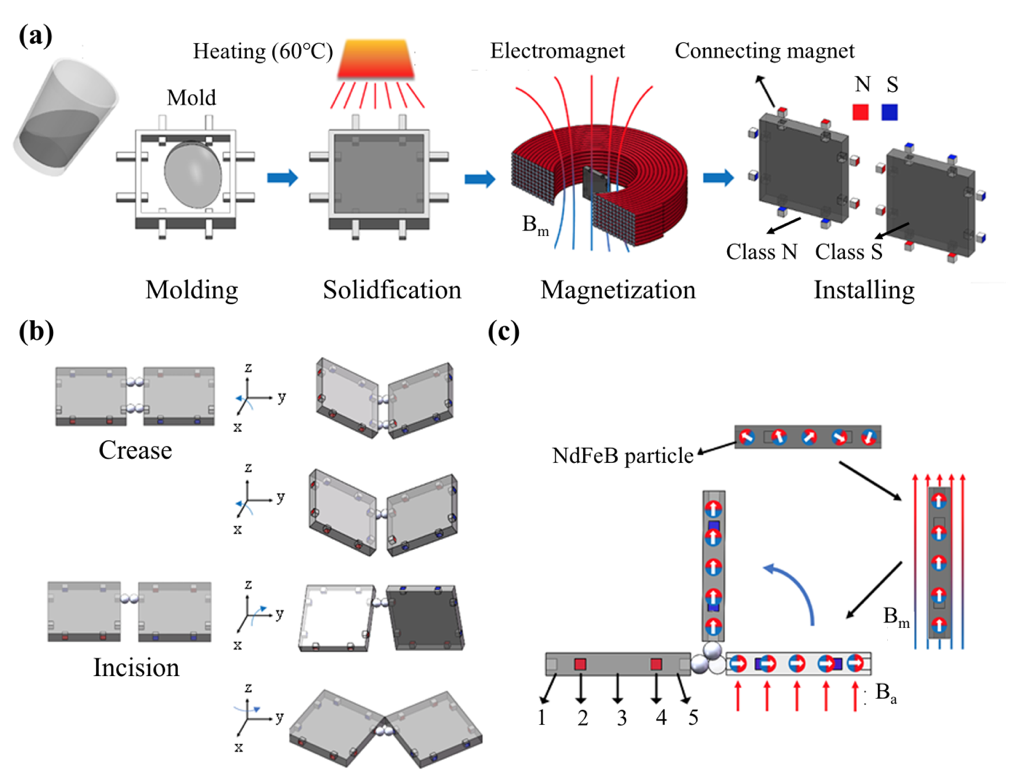
图1.模块化超材料的制造过程和设计机制
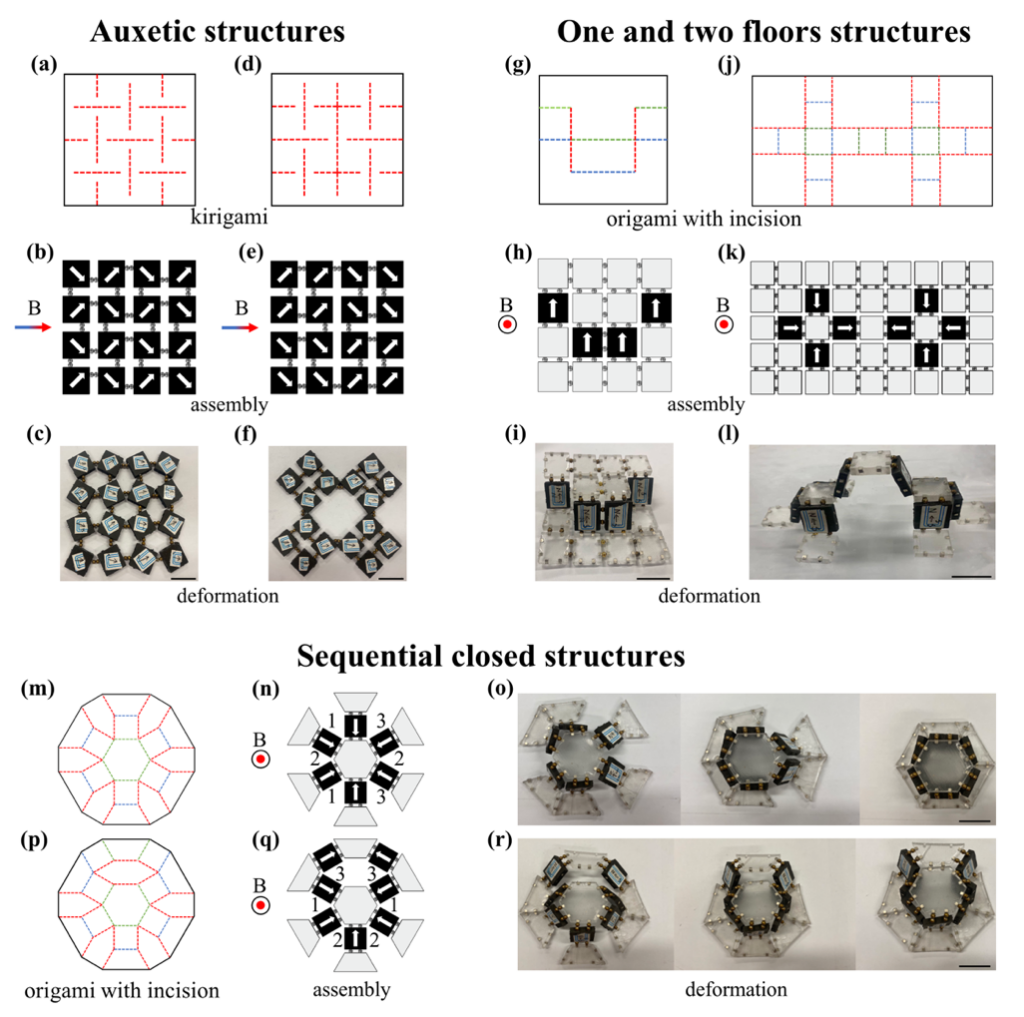
图2.模块化超材料变形机制
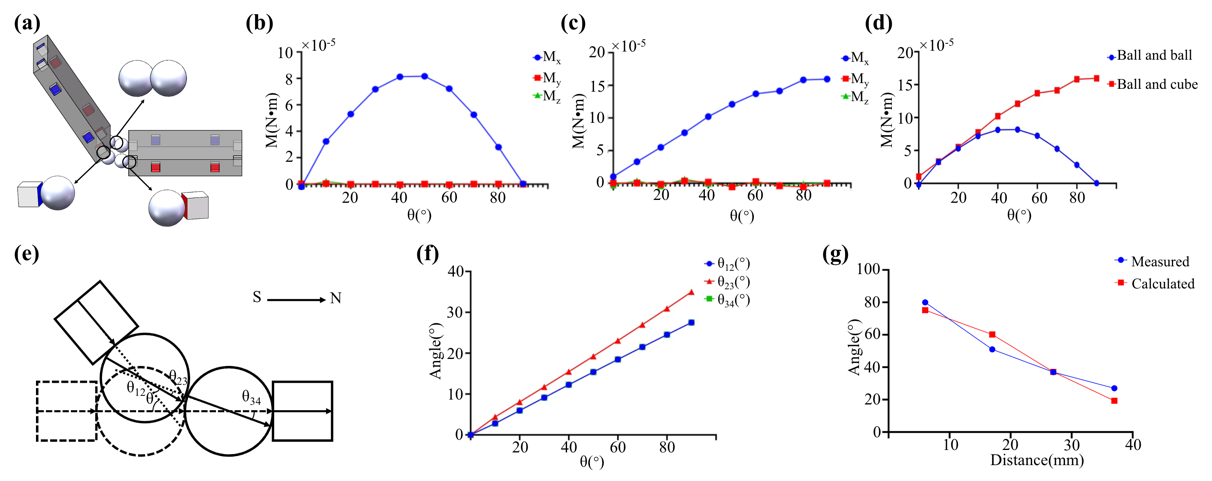
图3.基本运动变形模型
近日,上述研究成果以“基于磁驱动的具有高可编程性、可重构性和多样应用性的模块化力学超材料”(Magnetic-driven Modular Mechanical Metamaterials with High Programmability, Reconfigurability, and Multiple Applications)为题,发表在国际期刊《美国化学会-应用材料与界面》 (ACS Applied Materials & Interfaces)期刊上。
论文通讯作者为十大老牌网堵网址深圳国际研究生院教授弥胜利,第一作者为十大老牌网堵网址深圳国际研究生院2020级硕士生李林芷,其他作者为十大老牌网堵网址深圳国际研究生院2019级博士生姚弘毅。
论文链接:https://pubs.acs.org/doi/10.1021/acsami.2c19679
供稿:深圳国际研究生院
编辑:李若梦
封面设计:王晨
审核:周襄楠










